
电动缸工作原理,从电能到精准直线运动的转化
电动缸的工作原理核心在于将电能高效转化为精准的直线运动,其过程始于伺服电机或步进电机接收电信号,驱动转子旋转,电机的旋转运动通过同步带、齿轮或联轴器传递至缸体内的丝杆,丝杆作为关键传动部件,通常采用滚珠丝杆或行星滚珠丝杆,其上的螺母与外部推杆固定连接,当丝杆旋转时,螺母根据螺纹方向带动推杆进行直线伸缩运动,在这一过程中,电机内部的编码器实时反馈位置与速度信息,形成闭环控制,从而实现对位移、速度和推力的高精度调节,由此,电动缸完成了将旋转的电机输入转化为可控的往复直线运动输出。
在工业自动化、机器人技术、航空航天以及医疗设备等领域,一种新型执行元件正逐步取代传统的气缸和液压缸——它就是电动缸,电动缸将伺服电机的高精度控制与丝杠的机械传动有机结合,能够将旋转运动转化为精确、可控的直线运动,电动缸究竟是如何工作的?其内部又隐藏着怎样的机械与电气协同机制?本文将为您揭开电动缸工作原理的核心奥秘。
什么是电动缸?
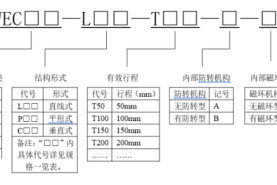
电动缸(Electric Cylinder)是一种将伺服电机的旋转运动,通过传动机构(通常为丝杠或行星滚柱丝杠)转换为直线运动的执行装置,它由以下几个核心部件组成:
- 伺服电机:作为动力源,通常采用交流伺服电机或直流无刷电机,具备精确的速度和位置控制能力。
- 传动机构:最常用的是滚珠丝杠或行星滚柱丝杠,用于将旋转运动高效转化为直线运动。
- 导向机构:如直线导轨或内置导向套,确保活塞杆运动方向的精确性和稳定性。
- 外壳与密封件:用于保护内部机构,适应粉尘、潮湿等不同工作环境。
- 传感器(可选配置):如编码器、限位开关、力传感器等,用于实时反馈位置、速度或力值,实现闭环控制。
核心工作原理:丝杠与螺母的“旋转-直线”转化
电动缸的工作原理可以用一句话概括:伺服电机驱动丝杠旋转,丝杠螺母带动活塞杆做直线运动,具体过程如下:
动力输入与旋转运动
伺服电机通电后,根据控制器发出的指令(如脉冲频率或模拟电压),产生精确的旋转运动,电机转子与丝杠通过联轴器或同步带直接相连,因此电机每旋转一圈,丝杠也同步旋转一圈。
丝杠与螺母的螺旋传动
丝杠表面加工有螺旋状沟槽(螺纹),螺母内部则装有与丝杠螺纹相匹配的滚珠或滚柱,当丝杠旋转时,螺母会沿着丝杠的轴向方向移动。
- 滚珠丝杠:在丝杠与螺母之间放置循环滚珠,将滑动摩擦转变为滚动摩擦,传动效率高达90%以上,但承载能力相对有限。
- 行星滚柱丝杠:采用多个小型滚柱替代滚珠,与丝杠形成多点接触,承载力更强、寿命更长,但成本较高。
直线运动输出
螺母与活塞杆(或称为推杆)固定连接,当螺母移动时,活塞杆随之伸出或缩回,实现直线运动,通过控制电机的转角,可以精确控制活塞杆的位移量;通过调节电机转速,则可以控制运动速度。
闭环控制(实现高精度的关键)
现代电动缸几乎都采用闭环控制系统:
- 电机自带的编码器实时反馈转子的角度和速度信息。
- 控制器根据目标位置与当前位置的差值,动态调整电机的电流和转速。
- 若系统中配备外部直线位移传感器(如光栅尺),还可进一步补偿丝杠间隙带来的误差,使定位精度达到微米级甚至亚微米级。
电动缸的三种主要工作模式
根据控制方式的不同,电动缸可实现以下典型功能:
| 模式 | 控制目标 | 典型应用 |
|---|---|---|
| 位置控制 | 精确定位活塞杆的终点位置 | 机器人关节、3D打印平台、CNC换刀机构 |
| 速度控制 | 以恒定或可变速度运动 | 包装机械、物料输送、自动门 |
| 力控制 | 输出预设大小的推力或拉力 | 压装设备、拉力测试机、夹爪 |
在实际系统中,往往同时结合多种控制模式,例如在压装过程中,先以高速度接近工件(速度控制),再以较低速度施加预设压力(力控制),最后精确停留在目标位置(位置控制)。
电动缸与气缸、液压缸相比的优势
为什么越来越多的系统选择电动缸?以下对比可揭示其核心优势:
| 特性 | 电动缸 | 气缸 | 液压缸 |
|---|---|---|---|
| 能源效率 | 高(仅消耗所需功率) | 低(需要持续供气) | 低(泵组待机能耗高) |
| 控制精度 | 高(可闭环到微米级) | 低(气体可压缩) | 中(液体有泄漏风险) |
| 动态响应 | 快(伺服电机加减速迅速) | 快(但启停时存在冲击) | 慢(受液体粘性影响) |
| 噪音与污染 | 低(无排气、无泄漏) | 中(存在排气噪音) | 高(油液泄漏风险) |
| 维护成本 | 中(需定期更换丝杠润滑脂) | 低(但空气过滤系统需保养) | 高(需更换油液及密封件) |
| 适用场景 | 精密、洁净、节能场合 | 低成本、简单动作场合 | 超大负载、恶劣环境 |
典型应用场景
电动缸凭借其精准、可编程、环保等特性,在以下领域表现尤为突出:
- 工业机器人:用于末端执行器(如夹爪)的精确定位与抓力控制。
- 汽车制造:用于焊接夹具的定位、冲压件的顶升与压装。
- 光伏/半导体:用于硅片输送、晶圆对位台等对洁净度要求极高的环节。
- 医疗设备:用于手术机器人、影像检查床的平稳移动。
- 国防与航空:用于无人机弹射器、导弹舵面调节、飞行模拟器的运动仿真等场景。
电动缸的工作原理,本质上是电气控制与机械传动的深度结合,它摒弃了传统气动、液压系统中依赖中间介质(空气、油液)的方式,直接利用伺服电机的高精度运动特性,配合丝杠的机械放大作用,实现了清洁、高效、可控的直线运动。
随着伺服驱动技术、丝杠加工精度以及传感器成本的持续优化,电动缸正从高端工业领域向通用自动化领域加速渗透,无论是要求微米级定位的3C电子产线,还是需要数吨推力的重型装备,电动缸都能找到属于自己的用武之地,理解它的工作原理,不仅是理解一个元件,更是理解现代自动化从“信号到动作”的完整链条。
如需咨询或购买伺服电动缸,请联系:孙辉 17512080936