
电动缸工作原理,从电能到直线运动的精密转换
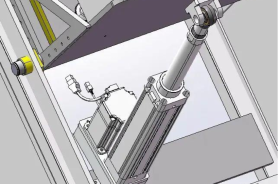
电动缸是一种将电能转换为精密直线运动的执行元件,其核心工作原理基于电机驱动与机械传动,交流或伺服电机通过联轴器直接带动滚珠丝杠或梯形丝杠旋转,丝杠上的螺母将旋转运动转化为沿轴向的直线运动,从而推动推杆实现伸缩,电机内部的编码器实时反馈位置信号,配合驱动器实现闭环控制,确保高精度定位与速度调节,相比液压与气动系统,电动缸具备免维护、节能环保、控制灵活等优势,广泛应用于工业自动化、机器人、航空航天等需要精密推力与位置控制的场景。
在现代工业自动化与智能制造领域中,电动缸作为一种将电能高效转化为直线运动的执行元件,正逐步替代传统的气动缸和液压缸,广泛应用于机器人、医疗设备、航空航天及精密加工等场景,深入理解电动缸的工作原理,不仅是掌握其性能优势的基础,更是实现精准控制与系统集成的关键所在。
电动缸的核心构成与能量传递路径
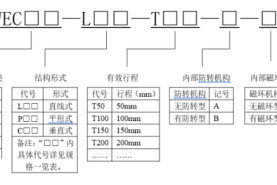
电动缸本质上是一种“旋转-直线”运动转换装置,主要由以下几个核心部件组成:
- 伺服电机(或步进电机):作为动力源,将电能转化为旋转机械能,伺服电机内置编码器,可实现位置、速度与扭矩的闭环控制,保证高精度运行。
- 丝杠副(滚珠丝杠或梯形丝杠):将电机的旋转运动转换为推杆的直线运动,滚珠丝杠因摩擦小、效率高(可达90%以上)且精度高,常用于高性能场合;梯形丝杠则结构简单、成本较低,适用于低速重载场景。
- 推杆与导向机构:推杆直接输出推力与位移,导向机构(如直线导轨或滑动轴承)确保运动方向的笔直性,防止偏转或抖动。
- 制动器与限位传感器:防止断电时推杆意外滑落,同时保证行程可控,提升安全性。
能量传递路径清晰明确:电能 → 电机旋转 → 联轴器(或同步带)→ 丝杠旋转 → 丝杠螺母的直线运动 → 推杆输出。
核心转换机制:丝杠副的物理原理
电动缸的“旋转-直线”转换依赖于丝杠与螺母之间的螺旋配合,当丝杠旋转时,螺母在螺旋槽的约束下沿轴向移动,其基本关系可表示为:
[ v = \frac{p \cdot n}{60} ]
( v ) 为推杆直线速度(mm/s),( p ) 为丝杠导程(mm),( n ) 为电机转速(rpm)。
导程越小,相同转速下的直线速度越慢,但推力越大;导程越大,速度越快,推力越小,这种“速度与力”的权衡关系,使电动缸能够在紧凑结构中实现高速与高负载的动态平衡。
滚珠丝杠之所以广泛应用于精密电动缸,关键在于其采用钢球在丝杠与螺母之间滚动,将滑动摩擦转化为滚动摩擦,大幅降低了启动力矩与磨损,使重复定位精度可达微米级。
控制闭环:实现精准定位的核心
电动缸并非简单的“一转一动”,其相较于气动或液压系统的真正优势,在于与伺服系统结合的闭环控制能力。
伺服控制器接收来自可编程逻辑控制器(PLC)或上位机的指令(如目标位置、速度或推力),并实时与电机编码器反馈的实际值进行比较,当两者出现偏差时,控制器迅速调整电机的电流与转速,补偿误差,这种闭环结构使电动缸具备以下能力:
- 精确定位:重复定位精度可达±0.01mm甚至更高;
- 速度可控:从极低的爬行速度到高速运动均可编程实现;
- 力控模式:通过监测电机电流间接控制输出推力,避免工件损坏;
- 多点定位:可在行程内任意位置停留,无需机械挡块,灵活性极高。
电动缸的典型工作流程示例
以一条自动化生产线中的“物料推送”工位为例,其工作流程如下:
- 启动阶段:系统接收信号,伺服电机以设定的加速度曲线开始旋转,丝杠带动推杆平稳伸出,避免冲击;
- 恒速推进:电机以固定转速旋转,推杆以恒定速度推动物料至预定位置;
- 减速与停止:接近目标位置时,控制器计算减速曲线,电机缓慢停止,推杆精确到位;
- 返回原点:完成推送后,电机反转,推杆以更快的速度返回初始位置,准备进入下一个循环。
整个过程平滑、安静,无气动系统的冲击声,也无液压系统的漏油风险。
电动缸的技术优势与发展趋势
相比传统气动缸,电动缸具备节能(仅工作时耗电,无需持续供气)、环境友好(无油污)、控制灵活(可编程实现复杂动作)等显著优势,相比液压缸,电动缸则具有结构紧凑、安装维护简单、且无泄漏隐患的特点。
当前,电动缸的发展正朝着以下三个方向演进:
- 高集成化:将电机、丝杠、编码器、驱控器集成于一体,减少外部接线,提升系统可靠性;
- 高速高负载:采用行星滚柱丝杠技术,实现数十吨推力与数米每秒的直线速度;
- 智能化联网:内置温度、振动、力传感器,实现状态自诊断与工业物联网接入,支持预测性维护。
电动缸的工作原理,本质上是一次精密、可控的“运动转换”——将平稳的旋转能量,转化为强劲而精确的直线推动,正是这种转换背后的物理机制、控制算法与制造工艺的深度融合,使电动缸成为现代工业体系中不可或缺的“直线肌肉”,理解它,便是理解了智能制造中一片关键拼图,也为更高效的自动化系统设计打开了大门。
咨询与购买伺服电动缸,请联系:孙辉 17512080936