
电动缸工作原理,从电机到直线运动的精密转换
电动缸是一种将电机的旋转运动转化为直线运动的精密执行元件,其工作原理为:电机通过联轴器或同步带驱动滚珠丝杠或梯形丝杠旋转,丝杠螺母将旋转运动转换为螺母的直线运动,进而推动活塞杆做往复伸缩,该过程依托于丝杠副的高效传动与机械自锁特性实现精确定位,电机的转速、扭矩由伺服或步进驱动器精确控制,配合编码器实时反馈位置,可达到微米级的重复定位精度,相较于液压、气动系统,电动缸具备响应快、能耗低、免维护等优势,广泛应用于自动化装备、医疗设备及工业机器人等需要高精度力控与位置控制的场景。

在现代工业自动化领域,电动缸作为一种将旋转运动转化为直线运动的执行元件,正逐步取代传统的气动缸和液压缸,凭借高精度、易控制、低能耗等显著优势,电动缸广泛应用于机器人、医疗设备、航空航天、汽车制造等行业,电动缸究竟是如何工作的?本文将深入解析其核心原理与结构组成。
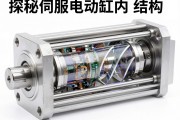
电动缸的基本结构
电动缸通常由以下几个关键部件构成:
- 伺服电机或步进电机:作为动力源,输出精确的旋转运动。
- 滚珠丝杠或梯形丝杠:将电机的旋转运动转化为直线运动,同时承受轴向负载。
- 螺母与活塞杆:螺母固定在丝杠上,随丝杠旋转沿轴向移动,从而带动活塞杆伸出或缩回。
- 导向机构:如直线导轨或滑动轴承,确保活塞杆运动平稳,避免侧向偏移。
- 外壳与密封件:保护内部精密部件,防止灰尘、油污等杂质侵入。
- 传感器(可选):如编码器、限位开关或磁致伸缩位移传感器,用于实时反馈位置、速度和力等信息。
核心工作原理:丝杠螺母副的动力转换
电动缸的工作原理可概括为“电机驱动丝杠旋转,丝杠带动螺母直线移动”,具体过程如下:
- 电机旋转:伺服电机或步进电机在控制器指令下,输出精确的旋转角度和转速。
- 丝杠旋转:电机轴通过联轴器或直接连接,驱动滚珠丝杠(或梯形丝杠)旋转。
- 螺母直线运动:螺母通过与丝杠螺纹的啮合,沿丝杠轴线方向移动,滚珠丝杠因内部设有循环滚珠,摩擦阻力极小,传动效率可达90%以上;而梯形丝杠则适用于低速、高负载场景。
- 活塞杆输出:螺母与活塞杆相连,其直线运动直接转化为活塞杆的伸出或缩回动作,从而实现对外部负载的推拉、提升或定位。
控制方式:闭环与开环系统
电动缸的精度与可控性体现在其控制系统中,根据是否使用反馈传感器,可分为:
- 开环控制(步进电机):通过控制脉冲数量与频率,直接改变电机转角和转速,无位置反馈,成本较低,适用于低精度、轻载应用。
- 闭环控制(伺服电机):通过编码器或光栅尺实时检测丝杠或活塞杆的实际位置,并将信号反馈给伺服驱动器,驱动侧根据误差自动调整电机转速和角度,从而消除机械间隙、热变形等误差,实现微米级定位精度。
电动缸的优势与应用场景
与传统液压缸和气缸相比,电动缸的工作原理赋予其独特优势:
- 高精度:闭环控制下,定位精度可达±0.01mm。
- 清洁环保:无油液泄漏,适用于洁净车间(如食品、医药行业)。
- 控制灵活:可精确控制速度、加速度、力和位置,且易于与PLC、机器人控制器集成。
- 节能高效:仅在运动过程中消耗电能,静止状态几乎不耗能。
典型应用:芯片封装设备中的精密对位、手术机器人关节驱动、AGV货叉升降、工业流水线自动化装配等。
未来趋势:智能电动缸
随着物联网与智能工厂的发展,电动缸正朝着“集成传感、自诊断、通信互联”的方向演进,集成力传感器和温度传感器的电动缸不仅能实时反馈推力,还能预警丝杠磨损或轴承过热,实现预防性维护,与工业以太网(如EtherCAT、Profinet)的深度集成,使得多轴电动缸系统能够实现毫秒级同步运动。
电动缸的工作原理本质上是一个“旋转→直线”的能量转换与精密控制过程,它通过电机、丝杠、传感器和控制器的高度协同,将简单的转动提升为高动态响应的直线运动解决方案,在工业4.0的浪潮中,电动缸正以其精准、灵活和智能的特性,成为推动自动化升级的关键基石。
上海伺服电动缸,精密制造的隐形引擎,驱动工业自动化的新未来
« 上一篇
2026-05-31
CKD电动缸,精密驱动的核心力量
下一篇 »
2026-05-31