
电动缸工作原理,从电机到直线运动的精密转换
电动缸的核心工作原理是将电机的旋转运动,通过精密机械结构高效转换为直线运动,以实现高精度控制,其过程为:伺服电机或步进电机输出旋转动力,驱动同步带或齿轮传动系统,进而带动滚珠丝杠或行星滚柱丝杠旋转,丝杠上的螺母通过与丝杠的螺纹配合,将旋转运动转化为螺母的直线往复运动,螺母直接驱动推杆或负载缸筒,实现沿直线导轨的平稳伸缩,整个过程中,内置的位置传感器实时反馈位置信号至控制器,形成闭环控制,从而在负载变化时仍能保证极高的定位精度、重复定位精度与推力输出的线性度,这种机制使得电动缸在对力、速度和位置有严苛要求的自动化设备中,成为替代液压与气动系统的理想方案。

在现代工业自动化中,电动缸作为一种将旋转运动转换为直线运动的执行元件,正凭借其高精度、低维护、节能环保等显著优势,逐步取代传统液压缸与气缸,要深入理解电动缸的应用价值,首先需要掌握其核心工作原理。
基本组成结构
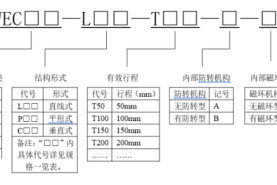
电动缸主要由以下几个关键部件构成:
- 伺服电机或步进电机:提供旋转动力源。
- 传动机构:通常采用滚珠丝杠或行星滚柱丝杠,将旋转运动转换为直线运动。
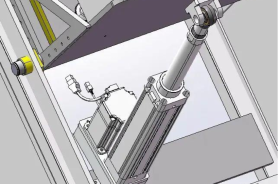
- 缸体与活塞杆:作为直线运动的输出部件,承受载荷并起到导向作用。
- 编码器/传感器:实时反馈位置、速度与力,形成闭环控制系统。
- 制动器与联轴器:用于紧急停止或动力传递过程中的缓冲与保护。
核心工作原理
电动缸的工作流程遵循“电机旋转 → 丝杠旋转 → 螺母直线移动 → 活塞杆伸缩”这一基本逻辑:
- 电机驱动:伺服电机接收到控制器发出的脉冲或模拟量信号后,按设定转速开始旋转。
- 丝杠传动:电机输出轴通过联轴器带动滚珠丝杠旋转,滚珠丝杠的螺旋槽内嵌有滚珠,当丝杠旋转时,滚珠在螺母与丝杠之间循环滚动,从而将旋转运动高效转换为螺母的直线运动。
- 输出动作:螺母与活塞杆(或缸体)固定连接,当螺母沿丝杠轴向平移时,推动活塞杆实现伸出或缩回,反之,若丝杠不转而活塞杆固定,缸体本身也会发生移动(例如在压机或顶升机构中常见)。
- 闭环控制:编码器实时测量电机的旋转角度与速度,并将数据反馈至驱动器,控制器根据预设目标位置与反馈值的差异,动态调整电机的电流与转速,确保活塞杆以极高的重复定位精度(可达±0.01mm)到达目标位置。
关键技术特点
- 高精度与高刚性:采用精密滚珠丝杠与伺服电机,电动缸可实现微米级的定位精度,且无液压油压缩性带来的误差。
- 同步与可编程控制:多台电动缸可通过同一控制器实现完全同步运动,适用于需要多点协调的场景(如舞台升降台、多轴机器人)。
- 力控制与过载保护:通过检测电机电流或集成力传感器,电动缸可精准控制输出力,并在超载时自动停止或发出报警。
- 清洁与低维护:无需液压油路或压缩空气管路,无泄漏风险,尤其适合洁净环境(如食品、医药行业);丝杠与轴承采用润滑脂密封,维护周期长。
与其他驱动方式的对比
- 对比液压缸:电动缸无需液压泵、油箱及复杂管路,系统集成度高,能耗降低30%~50%,且不存在油温变化对精度的影响。
- 对比气缸:电动缸动作稳定,可精确控制任意行程中间位置;而气缸在低速或中途停止时容易出现爬行现象,控制精度较差。
- 对比直线电机:电动缸具有更低的成本优势,在需要大推力(可达数百吨)且行程较长的应用中,其性价比更为突出。
典型应用场景
- 工业自动化:装配流水线上的推、拉、举升、翻转动作;冲压设备中的精准进给控制。
- 汽车制造:焊装线中的车身定位、车身压合、试漏机夹紧等环节。
- 医疗设备:手术台升降调节、CT扫描仪中患者床板的精准定位。
- 航天与军工:天线俯仰角度调节、发射架支撑系统、模拟台振动测试等。
- 新能源领域:太阳能光伏板角度自动调节、锂电池极片卷绕机中的张力控制。
电动缸凭借其机电一体化设计与闭环控制技术的结合,实现了高效、高精度的直线运动,随着伺服驱动技术和丝杠加工工艺的持续进步,其制造成本将进一步下降,应用范围也将从高端装备扩展到更广泛的民用自动化场景,理解电动缸的工作原理,不仅是选用合适执行器的基础,更是优化系统整体设计的起点。
咨询与购买伺服电动缸,请联系:孙辉 17512080936
精密驱动的核心,伺服电动缸如何重塑现代工业
« 上一篇
2026-05-30
CKD电动缸,工业自动化中的精准动力核心
下一篇 »
2026-05-31