
电动缸,精准动力背后的核心工作原理
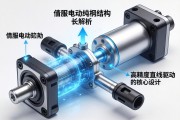
电动缸是一种将伺服电机旋转运动转化为精确直线运动的机电一体化装置,其核心工作原理在于:伺服电机接收控制信号后产生精确的旋转,通过同步带或联轴器驱动高精度滚珠丝杠副,滚珠丝杠将电机的旋转扭矩转换为螺母的直线推力,进而推动缸筒内的活塞杆做伸缩运动,整个过程集成了伺服电机的高响应、高精度控制优势与滚珠丝杠的高效率、高刚性传动特点,并通常配备内置编码器实现位置、速度的闭环反馈,这使得电动缸能实现精确的速度、推力和位置控制,替代传统液压或气动系统,成为自动化设备中实现精准、高效、洁净直线驱动的核心动力元件。
在现代工业自动化、高端装备制造以及航空航天领域,一种能够将电能精确转化为直线运动的装置正发挥着日益关键的作用——它就是电动缸,作为传统液压缸与气动缸的有力替代者,电动缸凭借高精度、高响应、清洁环保及易于控制等优势,已成为精密驱动领域的核心组件,这把开启精准运动的“钥匙”究竟如何工作?其背后是一个清晰而高效的能量转换与传递链。
理解电动缸的工作原理,首先需解析其结构,一个典型的电动缸主要由三大核心部分构成:
- 电机:作为动力源,通常选用伺服电机或步进电机,它负责接收控制系统发出的电信号指令,输出精确的旋转运动(包括扭矩与转速)。
- 传动机构:这是将旋转运动转化为直线运动的关键枢纽,多采用高精度滚珠丝杠或行星滚柱丝杠,丝杠旋转时,与之配合的螺母在螺旋副作用下沿轴向移动。
- 缸体与推杆:缸体作为整体支撑与导向结构,内部螺母与外部推杆相连,将螺母的直线运动直接传递给推杆,实现精准的伸缩动作。
工作流程:从指令到执行的精准闭环

电动缸的工作过程是一个典型的闭环控制系统,其流程可概括为以下步骤:
第一步:指令输入与电机驱动
控制系统(如PLC、运动控制器)根据预设程序或实时传感器反馈,计算出推杆所需的目标位置、速度及推力,并向伺服驱动器发送相应的电信号(通常为脉冲或模拟量),伺服驱动器将信号放大后驱动伺服电机旋转,实现对电机转速与扭矩的精确控制。
第二步:运动形式转换
电机的旋转轴通过联轴器直接或经同步带、齿轮减速后,带动精密滚珠丝杠旋转,在螺旋传动作用下,与丝杠啮合的滚珠螺母(通常设有防转机构)无法随之旋转,只能沿丝杠轴向作直线运动,这一过程高效地将旋转扭矩转换为直线推力。
第三步:动力输出与实时反馈
与螺母相连的推杆将直线运动传递至外部负载,完成推、拉、举、压等作业,集成于电机尾部的高精度编码器实时监测电机的转动角度与速度,并将信号反馈至驱动器,驱动器将反馈信号与初始指令进行比对,即时计算误差并调整输出电流,从而形成闭环控制,该系统能够实时补偿因负载变化、摩擦等因素引起的偏差,确保推杆精准到达预定位置并保持推力稳定。
核心优势:源于原理的卓越性能
基于上述工作原理,电动缸展现出以下几大突出优势:
- 高精度与高重复性:闭环控制结合精密丝杠传动,定位精度可达微米级,重复定位一致性极佳。
- 精密可编程控制:支持对速度、位置、推力进行复杂编程,实现平滑变速与多轴同步运动。
- 高动态响应:电信号传递与电机响应迅速,启停与换向过程灵敏,动态性能优越。
- 清洁节能:无需液压油或压缩空气,杜绝泄漏与污染,电能利用效率显著提高。
- 结构紧凑、维护简便:高度集成化设计节省安装空间,日常仅需基础润滑,维护成本低。
从原理层面看,电动缸本质上是一个将数字化电指令通过机电一体化方式,精确、可靠地转化为可控直线机械运动的智能执行单元,其工作机制不仅融合了机械设计、电机控制与材料科学的前沿技术,也体现了工业自动化向柔性化、智能化演进的发展趋势,随着技术持续进步,电动缸正以其内在的精准与高效,推动高端制造、实验设备、医疗器械乃至仿生机器人等领域的创新突破,助力各行各业迈向更智能的未来。
咨询与购买伺服电动缸,请联系:孙辉 17512080936