
伺服电动缸结构解析,精密传动的核心与创新
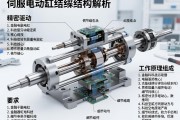
伺服电动缸作为精密传动的核心组件,其结构设计融合了创新与高效,它主要由伺服电机、高精度滚珠丝杠、同步带或齿轮传动机构、缸体及内置传感器等部分组成,伺服电机提供精准的动力输入,通过同步带或直连方式驱动滚珠丝杠旋转,从而将旋转运动转化为活塞杆的直线运动,其关键创新在于采用闭环控制系统,结合位置、速度与力矩传感器,实现微米级的位移精度与动态响应,优化的润滑密封结构提升了耐用性,而模块化设计便于集成与维护,这一结构不仅消除了传统液压系统的泄漏与能耗问题,还凭借高刚性、低噪音与长寿命,广泛应用于自动化装备、机器人及精密加工领域,实现了动力与控制的完美平衡。

核心组件:动力、传动与反馈的精密耦合
伺服电动缸的结构可拆解为三大核心模块:动力模块(伺服电机)、传动模块(丝杠副与导向机构)以及反馈与控制模块(传感器与控制器)。
-
伺服电机:作为动力源,通常采用永磁同步伺服电机(PMSM),具备高转矩密度、低惯量及宽调速范围的特点,电机转子直接或通过联轴器与丝杠连接,实现零背隙传动,确保控制精度。
-
滚珠丝杠副:是传动精度的核心,丝杠通常采用高硬度合金钢(如GCr15),经淬火与精密磨削加工,螺母内嵌循环钢球(或陶瓷球),将旋转运动转化为直线运动,丝杠的导程、螺距及预紧方式,直接决定了缸体的直线分辨率与轴向刚度。
-
导向机构:通常采用直线导轨或滑动轴承,用于承受径向载荷与倾覆力矩,确保活塞杆在高速移动时不发生偏摆,常见设计包括内置双导轨或外置滑块结构,可显著提升抗扭能力。
-
反馈传感器:多为绝对式或增量式编码器(安装在电机尾部),也可采用磁栅尺或光栅尺(安装在缸体侧面),实时反馈位置信号,在超高精度应用场景下,还会集成力传感器与温度传感器,形成完整的闭环反馈链。
传动机制:从旋转到直线的精密转换
伺服电动缸的传动路径可概括为:电机旋转 → 联轴器/同步带 → 丝杠旋转 → 螺母直线运动 → 活塞杆输出,根据丝杠类型的不同,其结构主要分为“滚珠丝杠式”与“行星滚柱丝杠式”两种主流方案。
-
滚珠丝杠式:适用于中等负载(<20吨)、高速度(<1.5m/s)及高精度(重复定位<0.01mm)场景,结构简单,成本可控,但受限于钢球接触应力,高速重载下易产生温升与磨损。
-
行星滚柱丝杠式:采用多个螺纹滚柱替代传统钢球,接触面积约为滚珠丝杠的10倍,可承受极高负载(>50吨)与冲击,使用寿命延长3–5倍,但其加工难度大、成本高,约为滚珠丝杠的2–4倍,广泛应用于注塑机、重型机械手等重载工况。
结构创新:集成化、轻量化与智能化的演进
近年来,伺服电动缸的结构设计呈现出三大创新趋势:
-
电机-丝杠一体化:采用“中空电机+丝杠穿轴”设计,电机转子直接作为丝杠的旋转部分,省去联轴器与轴承座,使轴向尺寸缩短30%–50%,适用于机器人关节等紧凑空间。
-
内置制动与缓冲模块:在缸体末端集成电磁制动器与液压缓冲器,实现断电自锁与柔性停止,有效避免高速运动时的过冲损坏。
-
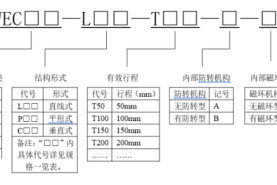
模块化与标准化接口:采用ISO 15552标准安装孔距,配合EtherCAT、Profinet等主流通信接口,使伺服电动缸可像“动力模块”一样快速接入自动化产线,提升系统集成的便捷性与兼容性。
发展趋势:从单一执行件到智能节点
随着工业4.0的深入推进,伺服电动缸的结构将进一步融合边缘计算与预测性维护功能,通过内置振动传感器与加速度计,实时监测丝杠磨损与预紧力变化;利用机器学习算法,根据电流波形预测剩余寿命,碳纤维丝杠、轻质铝合金缸体与高分子导向材料的应用,将使缸体重量降低40%以上,满足航空航天与医疗设备对轻量化的极致需求。
伺服电动缸的结构设计,本质上是机械精度、电气控制与材料科学的系统性协奏,从滚珠丝杠的精密磨削到行星滚柱丝杠的应力优化,从电机直连的刚性提升到内置传感器的智能反馈,每一个细节都折射出制造业对“更高效率、更强负载、更低故障”的不懈追求,在智能工厂的图景中,伺服电动缸正从单纯的“出力部件”,进化为集感知、决策、执行于一体的智能节点,推动工业自动化迈向全新的精度与协同高度。
咨询与购买伺服电动缸,请联系:
孙辉 | 电话:17512080936