
伺服电动缸结构解析,精密驱动的核心组成与工作原理
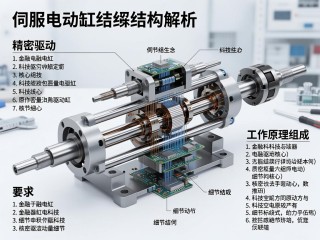
伺服电动缸的核心结构主要由伺服电机、滚珠丝杠、同步带或联轴器、缸体及高精度导向组件构成,其工作原理为:伺服电机输出旋转运动,通过联轴器或同步带直接驱动滚珠丝杠旋转,进而将丝杠的旋转运动转化为螺母及推杆的精确直线运动,缸体内部集成的导向机构确保了推杆的平稳伸缩,而编码器实时反馈位置与速度信号至伺服驱动器,形成闭环控制,这一设计实现了高精度、高响应速度的直线位移,是工业自动化中实现精密推拉、定位与力控制的关键执行元件。
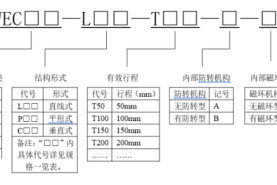
伺服电动缸本质上是一种将伺服电机的旋转运动转化为高精度直线运动的机电一体化执行元件,其典型结构通常包含以下几个核心部分:
-
伺服电机
作为整台设备的动力源,通常采用交流永磁同步伺服电机(亦可根据成本与精度需求选用步进电机),电机内部集成高分辨率编码器,用于实时反馈位置、转速与扭矩信号,构成闭环控制系统,确保精确的动态响应。 -
传动机构
这是实现运动形式转换的关键组件,常见方案包括:- 滚珠丝杠副:最为主流的结构形式,由精密丝杠、螺母及循环滚珠构成,其摩擦系数低,传动效率可达90%以上,能够实现微米级的重复定位精度。
- 行星滚柱丝杠:适用于高负载、高速度或极端恶劣工况,滚柱在丝杠螺纹间滚动接触,承载能力远超滚珠丝杠,使用寿命显著延长,且抗冲击性更强。
- 同步带/齿条传动:多用于需要超长行程或极高线速度的场合,但其传动刚性与定位精度通常低于丝杠类方案,且易受温度影响而产生伸长。
-
导向装置
用于承受径向与侧向载荷,并确保推杆沿轴向稳定伸缩,防止其发生旋转或偏摆,常见导向形式包括:
- 内置直线导轨:将导轨滑块嵌入推杆内部,结构紧凑,适用于中等负载与安装空间受限的工况。
- 外置直线导轨:在缸体外部独立安装导轨副,承载能力更强,维护方便,常用于重载或高刚性应用。
- 滑动轴承/铜套:成本低廉,但摩擦系数大、磨损快且精度较低,多用于低速、轻载、对精度要求不高的场合。
-
推杆与缸体
- 推杆:通常采用高强度合金钢或不锈钢精密管材制造,内壁与丝杠螺母固定连接,直接输出推力与位移,推杆表面可经镀铬处理以增强耐磨性,并集成防尘密封圈与刮油环,防止外部污染物侵入。
- 缸体:作为外壳与结构支撑件,常采用铝合金(轻量化)或优质碳钢(高强度),缸体内部加工有螺纹孔或导轨安装面,同时兼作散热体与防护罩。
-
连接与附件
- 电机连接法兰:通过高刚性联轴器或同步带轮,将电机输出轴与丝杠输入轴同轴或平行连接。
- 极限位置缓冲装置:如弹簧缓冲器、液压阻尼器或电子限位开关,有效避免推杆高速运行时撞击端盖,保护内部结构。
- 防旋转机构:在推杆伸出过程中起到限制其自转的作用,确保末端负载的方向始终恒定,常见于内置导向型或空心推杆型电动缸。
-
传感器与反馈系统
- 行程开关:采用光电式或磁感应式,可靠提供到位信号,用于安全保护或辅助定位。
- 外部位移传感器:如拉杆式或磁致伸缩式位移传感器,可提供全行程连续位置反馈,用于开环控制或冗余测量。
- 伺服电机内置编码器:作为闭环控制的核心传感元件,实时监测电机转子的角度与转速信息,是实现精密运动控制的基础。
典型结构的工作原理
以滚珠丝杠式伺服电动缸为例,其工作流程简要描述如下:
- 驱动:伺服控制器发出指令脉冲,伺服电机随即输出目标扭矩并开始旋转。
- 传动:电机通过高刚性联轴器驱动滚珠丝杠旋转,滚珠在丝杠螺纹槽与螺母之间滚动,将丝杠的回转运动转换为螺母的轴向直线运动。
- 导向与输出:螺母与推杆固定连接,推杆在直线导轨或滑动轴承的约束下,沿缸体轴向平稳伸缩,从而精准输出直线运动。
- 闭环控制:电机内置编码器实时采集转角与速度信号,并反馈至伺服驱动器,驱动器通过对比目标位置与当前实际位置,调整供给电机的电流与电压,不断补偿偏差,从而实现高精度定位(重复定位精度通常可达±0.01mm,高精度型号可进一步提升)。
不同应用场景的结构变体
- 重载型:采用行星滚柱丝杠、大尺寸滚动导轨及重型支撑法兰,专为冲压机、注塑机顶出等需要承受巨大轴向力的工况设计。
- 高速型:配备轻质高强度推杆、低惯量伺服电机、小导程滚珠丝杠副及强制冷却回路,适用于拾放、分拣等快速启停场景。
- 全密封型:采用金属波纹管或耐油橡胶防护套对推杆进行全包覆,有效隔绝粉尘、切屑液、水雾等污染物,常用于机床加工中心、焊接机器人等恶劣环境。
- 多轴联动型:由多个电动缸通过伺服系统异步/同步驱动,并辅以位置同步传感器或电子齿轮功能,用于并联机构(如六自由度运动平台、动感模拟器)。
结构设计的核心考量
在设计选型或结构优化时,以下因素应被重点评估:
- 刚性:丝杠轴系刚度、支撑轴承预紧程度、缸体及连接法兰的变形直接决定系统的谐振频率与抗振能力,必要时应借助有限元分析进行迭代优化。
- 热管理:丝杠副的摩擦热、电机绕组的铜损皆会积累热量,精密电动缸常内置冷却回路(如循环水冷)或采用软件热补偿算法,以抑制热漂移对精度的影响。
- 间隙消除:通过双螺母预紧结构(如双螺母垫片预紧)、预紧丝杠轴承组(角接触轴承背对背安装)可有效消除轴向间隙,显著提升正反向换向时的定位精度。
- 润滑与密封:长期稳定运行需依靠高效密封设计(如唇形密封+迷宫密封组合)防止污染物侵入,同时保证润滑脂按维护周期渗透至所有滚动与滑动界面。
伺服电动缸并非简单的“电机+丝杠”堆砌,而是一套精密集成、高度协同的机电一体化系统,其设计的优劣直接决定了性能边界:高刚性、无背隙的传动机构不仅带来卓越的重复定位精度,更支撑起优越的动态响应能力;独特的导向与密封设计赋予其在粉尘、水汽、油污等恶劣工况下持续可靠运行的能力;伺服电机的闭环反馈机制则确保了运动轨迹的绝对可控与实时纠偏能力。
伴随工业4.0对柔性制造与智能化水平的不断追求,伺服电动缸的结构设计正向着更紧凑、更模块化、更高集成度的方向演进(例如将编码器、驱动器、制动器甚至冷却单元集成于一体),有望成为更多自动化设备中不可或缺的“隐形脊柱”。
如需进一步咨询或选型采购,欢迎联系:
孙辉 | 手机:17512080936
进口伺服电动缸,精密驱动领域的隐形冠军为何难以替代?
« 上一篇
2026-07-04
伺服电动缸,精密驱动技术的核心动力
下一篇 »
2026-07-04