
电动缸,精准驱动的核心,解析其工作原理
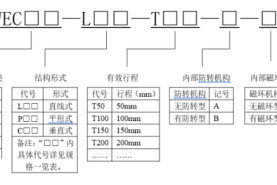
电动缸是一种将伺服电机的旋转运动转化为精确直线运动的机电一体化装置,是自动化设备中实现高精度、高响应驱动的核心部件,其核心工作原理在于:伺服电机接收控制信号,产生精确的旋转运动;通过同步带或联轴器,将动力传递给高精度的滚珠丝杠或行星滚柱丝杠;丝杠的旋转使与之啮合的螺母转化为直线位移,从而驱动活塞杆伸出或缩回,整个过程由内置的编码器或外部传感器实时反馈位置信息,形成闭环控制,实现对推力、速度和位置的毫厘级精准控制,电动缸集成了伺服控制、精密传动与反馈技术,以其高刚度、高效率、低维护和长寿命等优势,广泛应用于工业机器人、半导体装备、航空航天及试验测试等高端领域。
在自动化与精密控制领域,电动缸正日益成为替代传统液压与气动系统的关键执行元件,凭借其高精度、高响应、清洁环保及易于控制等优势,电动缸已广泛应用于工业机器人、精密机床、航空航天、试验设备以及医疗器械等行业,这颗“智能肌肉”究竟如何工作?其背后的核心原理是什么? 电动缸本质上是一种将电机的旋转运动转化为直线运动的机电一体化装置,它集成了伺服电机(或步进电机)、传动机构(如丝杠)、缸体、活塞杆,以及高精度传感器和控制器,共同构成一套完整的直线伺服系统,其最终目标,是实现对推力、速度与位置的精确、可编程控制。
工作原理的逐层解析

电动缸的工作原理可形象理解为“旋转运动”向“直线推进”的转换,其核心流程可分为以下几个关键环节:
动力输入:伺服/步进电机
作为系统的“心脏”,伺服电机或步进电机在接收到控制系统发出的指令(如位置、速度或扭矩信号)后,被精确驱动并输出特定转速与扭矩的旋转运动,伺服电机凭借其闭环控制特性(通过编码器实时反馈),能提供极高的控制精度与动态响应,因而成为高端电动缸的首选动力源。
运动转换:精密传动机构
这部分是实现“旋转到直线”转换的“骨骼与关节”,电机输出的旋转运动通过联轴器传递至内部传动机构,常见形式包括:
- 滚珠丝杠副:由丝杠和螺母组成,螺母外圈与缸筒内壁防转,当电机带动丝杠旋转时,滚珠在丝杠与螺母间的滚道中循环滚动,推动螺母沿丝杠轴线作直线运动,该方式传动效率高、定位精准、使用寿命长,是当前主流选择。
- 行星滚柱丝杠/梯形丝杠:行星滚柱丝杠承载能力更强、刚性更高,适用于重载高精场合;梯形丝杠则多用于对精度与效率要求相对一般的应用。
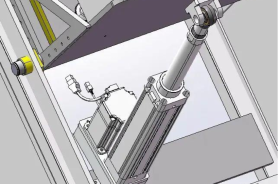
执行输出:活塞杆与负载
与螺母(或直接与丝杠,视具体结构而定)相连的活塞杆,将传动机构产生的直线运动向外传递,直接推动或拉动外部负载,从而完成预设动作,活塞杆的伸缩行程、运动速度及输出推力,均由电机运动经传动机构精确决定。
闭环控制:传感器与控制器(大脑与神经)
这是实现“精准”与“智能”控制的核心,系统并非开环运行,而是通过高精度编码器(通常集成于电机尾部或丝杠末端)实时监测电机或丝杠的旋转角度,进而换算出活塞杆的实际位置,并将信号实时反馈至控制器,控制器将反馈信号与目标指令进行比对,计算出误差值,并立即调节输出至电机的电流(即扭矩与转速),从而形成一个动态调整的闭环控制系统,该闭环机制确保即使面临外部干扰(如负载波动),系统也能迅速响应并修正,最终精确抵达目标位置、保持设定推力或速度。
核心优势源于其原理
电动缸的工作原理直接赋予其以下几大显著优势:
- 高精度:闭环控制结合精密传动机构,定位精度可达微米级。
- 高响应性:电机直接驱动,避免了液压/气动系统中介质压缩与阀件切换的延迟,启停及速度切换更为迅捷。
- 节能环保:仅在动作时消耗电能,无液压油泄漏风险,也无需压缩空气持续供能,运行清洁且噪音低。
- 柔性化控制:通过编程可轻松实现复杂运动轨迹(如S曲线加减速)、多轴同步、力位混合控制等功能,智能化程度高。
- 结构紧凑,维护简便:省去了油泵、油箱、气源处理单元等外围设备,安装空间小,日常维护简单。
总结而言,电动缸的工作原理是一个典型的“指令‑驱动‑转换‑反馈‑修正”机电闭环控制过程,它以电力为源、精密机械为体、智能控制为魂,将数字指令准确转化为物理世界的直线运动,随着工业4.0与智能制造的深入推进,对运动控制精度与智能化的要求不断提高,电动缸凭借其内在的先进工作原理,必将在未来自动化装备中扮演愈加核心的驱动角色。
咨询与购买伺服电动缸,请联系:孙辉 17512080936