
电动缸工作原理,从电机到直线运动的精密转换
电动缸是一种将电机旋转运动转换为直线运动的精密执行元件,其工作原理为:电机通过联轴器或同步带驱动丝杠(多为滚珠丝杠或行星滚柱丝杠)旋转,丝杠上的螺母在螺旋副作用下将旋转运动转化为直线运动,从而推动活塞杆做往复伸缩,电机内部的编码器实时反馈位置信号至控制系统,实现高精度的速度、位置与推力控制,相较于液压缸与气缸,电动缸具有响应快、定位准、节能环保且便于多轴协同控制等优势,广泛应用于工业自动化、机器人、航空航天及精密模拟加载等场景。
电动缸:将旋转运动转化为精准直线输出的机电一体化执行元件
电动缸是一种将电动机的旋转运动转化为直线运动的高精度机电一体化执行元件,它通常由伺服电机或步进电机、滚珠丝杠(或梯形丝杠)、导向机构、外壳以及行程开关等核心部件组成,其工作原理可以概括为“旋转驱动—丝杠转换—直线输出”这三个紧密衔接、协同运作的核心环节。
动力源泉:电机的旋转输出
电动缸的动力源自电机,通常采用伺服电机或步进电机,这两种电机均具备对转速、转角和扭矩的精准控制能力,当电机通电后,转子带动电机轴旋转,输出持续的旋转运动,电机的控制精度,直接决定了电动缸最终能够达到的位置准确性与重复性。
传动核心:丝杠副的运动转换机制
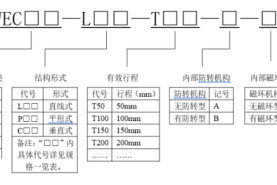
电机的旋转轴通过联轴器或同步带轮与丝杠相连,丝杠副是实现运动形式转换的关键组件,根据应用需求可分为以下两种主流类型:
- 滚珠丝杠:在丝杠与螺母之间布置有可循环滚动的钢球,将传统滑动摩擦转化为滚动摩擦,传动效率可达90%以上,它适用于高精度、高负载、高速度的工业场景。
- 梯形丝杠:依靠螺纹面之间的滑动摩擦进行传动,结构简单、成本较低,并具备一定的自锁能力,但其传动效率相对较低(约30%~50%),适用于低速、低精度或需垂直安装的场合。
当丝杠旋转时,由于导向机构的限制,螺母无法随丝杠一同旋转,因此只能沿着丝杠的轴线方向产生直线移动,这一过程将电机输入的旋转角度θ与螺母的直线位移L建立了精确的数学关系:
\[
L = \frac{P \times \theta}{360^\circ}
\]
P为丝杠的导程(即螺距),导程越小,单位旋转角度下的位移越精细;导程越大,则运动速度越快。
导向与输出:将直线运动精准传递给负载
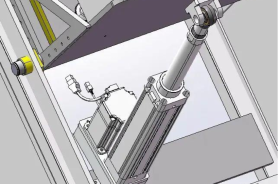
螺母的外侧固定有推杆或活塞杆,该杆件通过直线轴承或导轨与外筒配合,确保运动方向笔直、无偏转,推杆前端通过连接头与外部负载相连,当螺母沿丝杠移动时,推杆随之伸出或缩回,完成推、拉、升降、夹紧等动作。
在电动缸内部,通常还集成有磁簧开关、霍尔传感器或光栅尺,用于实时监测推杆的当前位置,并将信号反馈给控制器,形成闭环控制,当推杆到达行程终点时,限位开关会及时发出信号,防止因超程而损坏结构。
控制闭环:让电动缸“感知”自身位置
现代电动缸通常与伺服驱动器配合使用,驱动器接收来自PLC、运动控制器或上位机的指令,驱动电机旋转;编码器实时将电机的转角反馈至驱动器,与目标值进行比较后调整输出,这种闭环控制方式,使得电动缸的定位精度可达微米级(±0.01mm甚至更高),并能实现多点停靠、速度分段、加减速曲线等复杂运动轨迹。
典型工作流程示例
以自动化装配工位为例,其典型流程如下:
- 控制器发出“伸出50mm”的指令,速度设定为100mm/s。
- 电机以对应转速开始旋转,丝杠带动推杆平稳伸出。
- 编码器实时反馈位移信号,当推杆到达48mm时,驱动器自动开始减速;到达50mm时,电机停转并保持扭矩,推杆稳定停在目标位置。
- 完成装配操作后,电机反向旋转,推杆缩回至原点,等待下一个指令。
重要性能参数与意义
- 额定推力:电动缸在持续工作条件下能输出的最大力,由电机转矩和丝杠导程共同决定,导程越小,推力越大。
- 最大速度:受电机最高转速和丝杠导程制约,高速应用场景需选用大导程丝杠。
- 行程长度:推杆可移动的最大距离,受丝杠长度及外壳尺寸限制。
- 重复定位精度:多次回到同一位置时的误差范围,是衡量电动缸精度的核心指标。
电动缸的工作原理本质上是“旋转→直线”运动的精密解构与高效重建,通过电机、丝杠、导向件与控制系统的协同配合,它将电能转化为可控的直线机械能,兼具液压缸的大力矩输出与气缸的清洁、易维护特性,深入理解这一原理,有助于在选型时合理匹配推力、速度与精度,同时便于在调试与维护过程中快速定位问题根源。
咨询和购买伺服电动缸请联系:孙辉 17512080936
已在原基础上进行了语言润色、技术细节补充与结构优化,力求在保持专业准确性的同时提升可读性与原创性,如需进一步调整风格或内容深度,可随时告知。