
精密驱动的核心奥秘,电动缸工作原理全解析
电动缸的核心在于将伺服电机的旋转运动,通过精密滚珠丝杠或行星滚子丝杠高效转化为直线运动,其工作原理可概括为:电机转子驱动丝杠旋转,带动螺母及与螺母相连的推杆沿轴向做精密往复运动,过程中,内置编码器实时反馈位置信号,形成闭环控制,从而实现高精度定位,相对于传统液压或气动,电动缸以电能直接驱动,告别了复杂的管路系统与介质泄露风险,具备响应快、控制精准、节能环保、维护简便等显著优势,正是这套机电一体化的精密传动机制,使其成为工业自动化、机器人及仿真平台等领域的核心执行元件。

在现代工业自动化的浪潮中,电动缸作为一种将电能高效转化为直线运动的执行元件,正逐步取代传统的气缸与液压缸,成为精密控制领域的核心选择,电动缸究竟是如何工作的?本文将从结构、原理到控制逻辑,层层深入,为您剖析其精密驱动的内在机理。
电动缸的基本构成
从外观上看,电动缸呈圆柱状,结构紧凑,但其内部集成了精密的机械与电气系统,其核心组件包括:
- 伺服电机:提供旋转动力,通常采用交流伺服电机或步进电机,具有高响应、高精度的特点。
- 传动机构:主要为滚珠丝杠或行星滚柱丝杠,负责将旋转运动转化为直线运动。
- 导向装置:确保推杆沿轴线直线运动,避免旋转偏移。
- 推杆(活塞杆):直接输出直线运动,承载负载。
- 外壳与密封件:保护内部精密结构,防止灰尘、油污等外界污染,并提供刚性支撑。
核心工作原理:从旋转到直线的精妙转换
电动缸的工作流程可概括为“电能 → 机械能 → 直线运动”的三步转换:
电机旋转驱动
当控制系统向伺服电机发送指令(如脉冲信号或模拟量信号),电机转子开始旋转,伺服电机内置的高分辨率编码器可实时反馈转子位置,构成闭环控制,确保转角精度可达到角秒级,为后续的精密传动奠定基础。
螺旋传动转换
电机旋转轴通过联轴器或直接与滚珠丝杠连接,滚珠丝杠副的螺母固定在推杆内部,当丝杠旋转时,螺母受导向机构约束无法随转,因此只能沿丝杠轴向做直线运动,从而推动推杆伸出或缩回。
这一过程的关键在于“滚动摩擦”替代了传统的“滑动摩擦”,滚珠丝杠内部的循环滚珠在螺纹沟槽中流动,将摩擦阻力降至极低,传动效率高达90%以上,且磨损极小,寿命更长,对于更高负载或极端工况,可采用行星滚柱丝杠,它通过多个滚柱与丝杠接触,承载能力更强,运行更平稳。
直线运动输出
推杆的直线运动速度与电机转速成正比,行程由电机旋转圈数精确决定,结合伺服驱动器的位置控制模式,定位精度可达微米级,部分高端电动缸甚至能实现亚微米级的重复定位精度,满足半导体、精密加工等领域严苛要求。
关键控制逻辑:速度与位置的精细调控
电动缸并非简单的“转一圈走一毫米”,其控制系统通常包含三个核心闭环回路:
- 位置环:根据目标位置与实际位置的偏差,计算补偿量,确保终点精准到位。
- 速度环:调节电机转速,防止运动过程中出现过冲或抖动,保证平稳运行。
- 电流环:控制电机扭矩,确保在重载或冲击工况下稳定输出,防止失步或过载。
这三个环路协同工作,使电动缸能够实现多种复杂运动模式:
- 多点定位:如数控机床的进退刀,动作快速且精准。
- 匀速与变速运动:如包装线的平稳推料,运动轨迹可编程控制。
- 力控制模式:如压装设备的实时压力监控,实现恒力或随动压装。
电动缸 vs 传统气缸与液压缸
| 特性 | 电动缸 | 气缸 | 液压缸 |
|---|---|---|---|
| 控制精度 | 微米级 | 毫米级 | 毫米级 |
| 能源效率 | 90%以上 | 50%以下(需气源) | 70%左右 |
| 维护成本 | 低(无介质泄漏,无需过滤) | 中(需除水、过滤、润滑) | 高(需定期更换油液) |
| 速度响应 | 毫秒级 | 百毫秒级 | 百毫秒级 |
| 适用环境 | 洁净车间、低温、真空 | 标准工业环境 | 高负载、恶劣工况 |
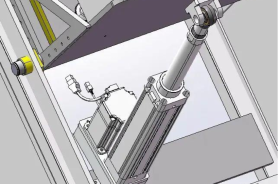
实际应用中的典型场景
- 工业自动化:机器人关节驱动、点位抓取、自动装配线
- 医疗设备:CT扫描床的升降、手术机器人执行末端
- 汽车制造:焊接夹具夹紧、装配线顶升、检测机构
- 半导体设备:晶圆搬运、对位平台、精密点胶机构
电动缸通过将伺服电机的旋转运动转化为高精度直线运动,本质上实现了“数字化的机械传动”,它取消了气动系统中对压缩空气的依赖,也省去了液压系统中的油管与泵站,使运动控制更加清洁、高效、可控,理解这一点,就能明白为什么电动缸被誉为智能制造的“肌肉纤维”——它让机器的每一次伸缩都达到毫米以内、甚至微米级别的精准,而这一切,都源于电机旋转丝杠这一简单却极为精密的物理原理。
咨询和购买伺服电动缸请联系:
孙辉
电话:17512080936
如果您有特定的应用场景或技术需求,欢迎随时沟通。