
精密与力量的融合,伺服电动缸的结构原理与应用解析
精密与力量的融合,是伺服电动缸的核心优势,其结构主要由伺服电机、高精度滚珠丝杠、缸体及传感器组成:伺服电机输出旋转运动,通过联轴器驱动丝杠旋转,进而转化为螺母及推杆的直线运动,内置的编码器与力传感器形成闭环控制,精准调节位置、速度与推力,实现微米级定位和毫秒级响应,相较于液压系统,它具备节能、洁净、免维护的特点,广泛应用于工业自动化、机器人关节、航空航天测试及医疗设备等需要精确力控与高速响应的场景,成为现代智能制造中取代传统气缸与液压缸的核心执行元件。
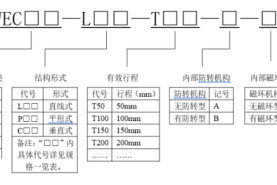
伺服电动缸本质上是一种将旋转运动高效转化为直线运动的机电一体化执行元件,其整体结构通常包含五大核心单元:驱动单元(伺服电机)、传动单元(丝杠副)、执行单元(推杆与导向机构)、支撑与壳体单元(缸筒、端盖等)以及反馈与控制单元(编码器、传感器等),这些单元相互耦合、协同工作,共同决定了电动缸在精度、负载能力、使用寿命以及动态响应特性等方面的综合表现。
核心部件逐一解析
驱动单元:伺服电机
伺服电机是电动缸的动力来源,通常采用永磁同步电机或交流伺服电机,其主要技术特点包括:
- 高响应性:从静止状态加速至额定转速仅需数毫秒,能够精确跟随复杂的运动指令。
- 精确调速:配合高分辨率编码器可实现无级精确调速,稳态转速误差通常小于标称值的0.01%。
- 过载能力:在短时工况下,可提供3倍甚至高达数倍的峰值扭矩,以满足启动、急停或冲击负载的需求。
- 连接方式:电机轴通常通过高刚性联轴器与丝杠连接;在紧凑型设计中,也常采用电机转子与丝杠直接耦合的“直连式”结构,以消除传动间隙并缩短轴向尺寸。
传动单元:丝杠副
丝杠是决定电动缸精度与推力的核心零件,工程应用中,常见类型及其特点如下:
| 类型 | 特点 | 适用场景 |
|---|---|---|
| 滚珠丝杠 | 采用滚动摩擦,传动效率高达90%以上;通过预紧工艺可消除反向间隙,使用寿命长。 | 高精度定位、高速往复运动、对能耗有要求的自动化产线。 |
| 滑动丝杠(如梯形丝杠) | 具有优良的自锁性能,制造成本低;但摩擦系数大,传动效率低,易磨损。 | 低速重载、不需要频繁换向、对断电自锁有刚性要求的场合。 |
| 行星滚柱丝杠 | 通过多个滚柱与丝杠、螺母多点接触,承载能力是同等规格滚珠丝杠的3倍以上,抗冲击性和刚度极佳。 | 极端重载、高刚性需求、高振动或粉尘等恶劣工业环境。 |
丝杠的导程直接决定了推杆的直线运动速度和理论推力,小导程设计可获得更大的推力,但速度相对较慢;大导程则与之相反。
执行单元:推杆与导向机构
- 推杆:作为与外部负载直接连接的执行部件,推杆由丝杠螺母驱动,通常设计为高强度中空管状结构,以减轻重量并增加刚性,其前端可根据应用需求安装多种连接头,如球头、耳环、法兰盘等。
- 导向机构:为防止推杆在伸缩过程中发生旋转或承受弯矩时产生偏斜,电动缸内部集成了导向键、花键或直线导轨等导向元件,这些机构确保了推杆仅作纯粹的直线运动,并能有效承受一定的侧向力和径向负载,保障运动过程的平顺性与稳定性。
支撑与壳体单元:缸筒、端盖与轴承
- 缸筒:作为电动缸的主体结构,缸筒通常采用高强度铝合金或不锈钢材质制造,表面经硬质阳极氧化或镀铬处理,在实现轻量化的同时兼顾了耐腐蚀性与良好的散热性能。
- 端盖:前后端盖是关键的承载与密封部件,后端盖通常集成电机安装座并内置丝杠轴承,前端盖则包含推杆的导向与密封装置,如防尘圈和油封,用以隔绝外部污染物。
- 轴承系统:丝杠的两端通常由高精度的角接触球轴承或圆锥滚子轴承支撑,用以承受巨大的轴向推力和径向负载,轴承的预紧程度是影响整机轴向刚性与旋转精度的关键工艺参数。
反馈与控制单元:编码器与传感器
- 编码器:通常安装在伺服电机尾部或直接与丝杠末端相连,用于实时检测电机转子或丝杠的旋转角度与速度,它将信号反馈至伺服驱动器,构成精准的闭环控制系统,常见编码器分辨率范围为1000至10000线/转,高精度应用的需求可达亚角秒级别。
- 限位传感器:多采用非接触式的磁簧开关或霍尔传感器,安装于缸筒内部或端盖处,用于检测推杆是否到达安全行程的极限位置,有效防止发生机械碰撞损坏。
- 温度传感器(选配):可集成于丝杠螺母或轴承座附近,实时监测关键运动副的温升情况,用于过热保护或为智能润滑算法提供数据支持。
结构如何协同工作:一个完整的动作循环
- 指令输入:上位机(如PLC或运动控制器)根据工艺需求,向伺服驱动器发送明确的目标位置、运动速度或输出力矩指令。
- 电机旋转:伺服驱动器根据接收到的指令精确输出电流,驱动伺服电机按指定的转速和转矩旋转。
- 运动转换:电机轴通过联轴器或直连方式带动丝杠旋转,丝杠上的螺母则将连续的旋转运动平滑地转化为推杆的直线运动。
- 实时反馈:编码器持续检测电机转子的实时位置(或速度),并将信号反馈至伺服驱动器,驱动器内的控制算法将实际值与目标值进行比对,通过PID等调节方式实时调整输出电流,从而实现高精度的闭环控制。
- 位置锁定:当指令停止后,驱动器通过维持电机转子电磁扭矩或配合内置的电磁制动器,使推杆在任意位置保持静止,无需额外能量维持,实现了可靠的自锁定位功能。
结构设计的差异化趋势
- 紧凑型结构:采用内嵌式电机与丝杠一体化设计,极大缩短了轴向长度,特别适用于协作机器人关节、医疗设备等空间极为受限的场景。
- 重载型结构:选用行星滚柱丝杠,配合高刚性双列轴承支撑和加强筋壳体,能够承受数吨乃至更高的推力,主要应用于大型锻压、注塑机等重工领域。
- 高速轻载型结构:采用空心轴电机配合低惯量高速滚珠丝杠,并使用轻质铝合金缸体,其运动加速度可达2G以上,适合用于高速分拣、激光打标等轻载快节拍场合。
- 集成化结构:将伺服驱动器、运动控制器甚至通讯总线接口直接集成在电动缸壳体上,形成高度集成的“智能电动缸”,这种结构有效减少了外部线缆的连接,显著提升了系统的电磁兼容性和安装便捷性。
精密驱动新纪元,如何甄选卓越的伺服电动缸厂家
« 上一篇
2026-05-08
精准驱动,高效赋能,进口伺服电动缸的工业价值与技术解析
下一篇 »
2026-05-08