
伺服电动缸结构,精密传动与控制的核心解析
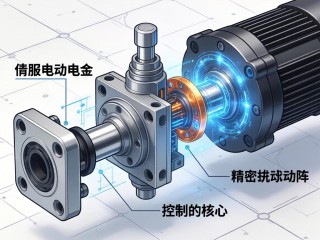
伺服电动缸是一种将伺服电机与丝杠传动机构高度集成的精密执行单元,其核心结构包括永磁同步伺服电机、高精度滚珠丝杠或行星滚柱丝杠、同步带/联轴器传动组件,以及内置的力与位置传感器,工作时,伺服电机输出旋转运动,通过丝杠螺母副高效转化为直线运动,并借助闭环控制系统实时反馈位置、速度与力矩数据,实现微米级定位精度与动态响应,关键设计在于消除传动间隙、优化预紧力及采用低摩擦密封技术,从而在高速往复运动中保持稳定输出,该结构广泛用于自动化装配、机器人关节及模拟测试设备,成为精密传动与控制的核心载体。

在工业自动化飞速发展的今天,伺服电动缸凭借其高精度、高刚性、长寿命等突出优势,正逐步取代传统液压缸与气动缸,成为智能制造领域不可或缺的核心直线驱动单元,要理解它为何能实现“指哪打哪”般的精准控制,探究其精密的内部结构是关键,本文将深入解析伺服电动缸的典型结构组成及各部分的核心功能。
动力源:伺服电机与编码器
伺服电动缸的“心脏”是高性能的伺服电机,与普通异步电机不同,伺服电机具有低惯量、高响应、宽调速范围等特点,能够在极短时间内完成启动、停止及方向切换,电机后端通常集成高分辨率编码器(如绝对值或增量式编码器),实时反馈转子的位置、速度与加速度信号,构成闭环控制系统的第一环,这种设计使得电动缸的位移精度可达微米级,重复定位精度可控制在±0.01mm以内,为精密运动控制奠定了坚实基础。
传动机构:精密滚珠丝杠副
伺服电机的旋转运动需转换为直线运动,这一任务由丝杠副完成,伺服电动缸最常用的传动方案是滚珠丝杠副,其结构包括丝杆与螺母,并在两者之间的滚道中填充大量高精度钢珠,滚珠的滚动替代了滑动摩擦,使传动效率高达90%以上(传统梯形丝杠仅约40%),同时显著降低启动力矩与系统温升,为消除反向间隙,许多电动缸采用双螺母预压技术,确保正反向运动切换时的“零背隙”,极大提升定位精度与重复性,对于追求超高速度或超大推力的应用场景,也有采用行星滚柱丝杠的方案,其承载能力与使用寿命更优,但结构更复杂,成本也相对更高。
导向系统:直线导轨与滑块
为实现丝杠推杆的平稳、直线运动,电动缸内部必须配备高刚性导向结构,常见的设计是在缸体内部集成一对精密直线导轨或滑动轴承,导轨与滑块配合,为推杆提供侧向与扭矩方向的支持,有效防止因负载偏心或侧向力导致的丝杠弯曲或卡死现象,高端伺服电动缸还会采用循环滚珠直线导轨,其运动平顺、摩擦系数小,能够确保在高速往复运动下保持极低振动,进一步提升运行稳定性。
执行与防护:推杆与密封组件
推杆是直接将推力输出至负载的部件,通常采用高强度合金钢或经过硬铬镀层处理的钢管制成,表面光滑耐磨,推杆前端安装有连接头(如单耳、双耳或法兰),方便与外部机构连接,为防止灰尘、冷却液、切屑等污染物侵入缸体内部,电动缸配备了多道密封装置:前端采用防尘密封圈与刮屑环的组合,确保推杆往复运动时杂质无法进入;后端则通过波纹护套或迷宫密封保护丝杠与螺母的裸露部分,部分电动缸还内置限位开关或磁开关,防止推杆超出机械行程,进一步提升使用安全性。
本体与散热:缸筒与冷却装置
缸筒不仅是各部件的安装基体,还承担着散热与防护功能,材质一般为高强度铝合金或铸铁,通过合理的筋板设计平衡刚度与重量,对于连续高频次工作的伺服电动缸,电机与丝杠摩擦会产生大量热量,若散热不畅,会导致丝杠热膨胀伸长,进而破坏定位精度,部分型号在电机外壳或缸筒壁内嵌有冷却水通道,或采用强制风冷风罩,维持系统在稳定热平衡状态下运行,确保长期工作精度。
核心控制元件:驱动器与PLC的协作
虽然驱动器、PLC等外部控制设备并不属于电动缸的“机械结构”,但它们是伺服电动缸正常运行不可或缺的电子控制部分,伺服驱动器接收编码器反馈信号,与PLC发出的指令进行PID比较与计算,输出精确电流驱动电机,这种“位置-速度-电流”三环控制架构,使得电动缸能够跟随复杂的运动曲线(如S形加减速、电子凸轮等),适应高动态响应的工业应用需求。
伺服电动缸的结构设计并非简单地将电机与丝杠“拼凑”在一起,而是通过精密计算与系统优化,将电机、传动、导向、密封、散热等多系统协调融合,从微观的滚珠摩擦到宏观的刚性支撑,每一处细节都直接决定了整机的动态响应、使用寿命与可靠性,随着伺服驱动技术与材料工艺的不断进步,电动缸正向着更高集成度(如一体化缸驱)、更高能效比(如永磁同步与直接驱动)迈进,持续推动工业自动化向柔性、绿色、智能的方向进化。
咨询和购买伺服电动缸请联系:孙辉 17512080936
如果您需要进一步的修改(例如调整语气风格、增加应用场景案例、或适配特定平台如官网/公众号),欢迎随时告知,我可以继续为您优化。