
伺服电动缸与伺服电机的协同进化,驱动智能制造的精密动力源
摘要如下:伺服电动缸与伺服电机的协同进化,正成为驱动智能制造的精密动力源,二者通过深度融合与动态优化,实现了从单一运动控制到系统化精密驱动的跨越,伺服电机提供高响应、高精度的旋转动力,而电动缸则将其转化为平稳、可控的直线运动,并集成位置、力与速度的闭环反馈,这种协同不仅提升了设备在自动化装配、机器人等场景中的定位精度与动态性能,还通过智能化算法的导入,实现了自适应调节与能效优化,由此,智能制造得以在高速、高负载与复杂工艺中,获得更可靠、更柔性且更具可持续性的核心动力支撑。
伺服电动缸与伺服电机:驱动智能制造的核心“黄金搭档”
在工业4.0与智能制造的浪潮推动下,传统液压与气动执行机构正逐步被更具灵活性、可控性及能效优势的电动驱动方案所取代,在这一技术迭代的关键进程中,伺服电动缸与伺服电机这对“黄金搭档”,凭借其卓越的位置控制精度、迅捷的速度响应能力以及高度集成化的系统特性,已成为自动化产线、机器人关节、航空航天测试设备乃至高端医疗器械等领域的核心动力单元,本文将从技术原理、协同机制及典型应用三大维度,深入解析伺服电动缸与伺服电机的融合价值与工程实践。
技术原理:从旋转到直线运动的高效转化
伺服电机:闭环控制系统的核心引擎
伺服电机是一种能够在闭环控制系统中实现精确位置、速度和力矩控制的电动机,其内部集成了编码器或旋转变压器等反馈装置,能够实时将转子的角度、转速及转矩信息回传至驱动器,驱动器依据指令信号与反馈信号的偏差,通过PID算法或更先进的自适应控制算法,精确调节电机的输入电流,从而确保输出状态严格跟随目标值,市面上主流的交流伺服电机具备高过载能力、低转动惯量和宽调速范围(通常可达1:5000以上),使其成为高动态响应、高精度应用场景的理想选择。
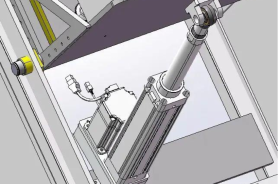
伺服电动缸:实现精密直线运动的机电一体化执行机构
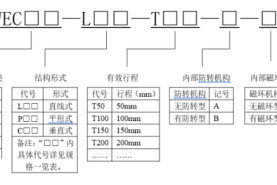
伺服电动缸是将伺服电机的旋转运动精确转化为直线运动的机电一体化装置,其核心结构通常包括以下几个部分:
- 驱动单元:通常为交流伺服电机,可直接或通过联轴器、同步带轮等方式与传动机构相连。
- 传动机构:常见方案包括滚珠丝杠、行星滚柱丝杠或皮带传动,滚珠丝杠因其低摩擦、高效率及长寿命而被广泛应用;行星滚柱丝杠则更适用于重载、高频次或极端工况环境。
- 导向与支撑部件:包括导轨、活塞杆和缸筒,确保输出端(推杆)能够承受一定的径向力,并保持稳定的直线运动轨迹。
- 反馈与安全机构:部分高端电动缸内置直线光栅尺,可独立测量推杆的绝对位移,有效消除丝杠间隙、弹性变形及热膨胀引起的误差;系统常配备过载保护、限位开关或电机制动器,保障运行过程的安全可靠。
伺服电机与电动缸的协同机制:决定系统级性能的关键
伺服电动缸的最终性能,不仅取决于电机或丝杠的个体参数,更依赖于两者在电气、机械及控制层面实现精准、协调的匹配。
电气匹配:功率与电流的精确适配
驱动器输出电流与伺服电机额定扭矩,必须满足电动缸在工作循环内的最大推力及峰值加速度需求,在高速高加速场景下,电机可能需要短时输出3倍额定扭矩,这就要求驱动器具备冗余过载能力,同时电机绕组能在不触发过热保护的条件下承受短期大电流,电机反电动势常数与丝杠导程的组合,共同决定了电动缸的最高直线运动速度——导程越大,相同转速下速度越快,但所需的驱动扭矩也随之增大。
机械耦合:刚度与惯量的平衡优化
电机转子与丝杠之间通过联轴器、齿轮箱或直连方式传递动力,关键设计参数之一是总惯量匹配,一般而言,负载惯量(折算至电机轴)与电机转子惯量的比值建议不超过5:1,具体视系统所需的动态性能而定,当负载惯量过大时,系统动态响应会显著变慢,甚至引发振荡,在伺服电动缸设计阶段,应通过合理选择丝杠导程或引入齿轮减速比来优化惯量匹配,同时确保机械联接的扭转刚度足够高,以最大限度减少弹性变形对位置精度的不利影响。
控制协同:从半闭环到全闭环的进阶
在传统应用中,伺服电动缸普遍采用电机端编码器进行旋转位置测量,再由控制器完成半闭环位置控制,但这种方案无法补偿丝杠间隙、弹性变形及温度漂移带来的误差,在高端应用场景(如精密压装、半导体晶圆搬运)中,工程技术人员倾向于采用全闭环控制策略——即在电动缸推杆侧直接安装直线光栅尺,将实际的直线位置信号反馈给伺服驱动器或运动控制器,从而有效消除背隙与柔性误差,使定位精度可达微米级甚至亚微米级,部分高级驱动器还支持转矩限制模式,当电动缸作为压装执行器时,电机输出扭矩与推力成正比,可实现恒力或力-位混合控制,极大拓展了应用边界。
典型应用场景分析
工业自动化:高速精准的物料搬运与组装
在包装、电子装配、锂电池极片叠片等自动化生产线中,伺服电动缸常被用于执行抓取、升降、定位和压合等关键工序,以智能手机屏幕贴合设备为例,一对伺服电动缸可协同工作,通过电流环的精确控制实现毫秒级的力与位置跟随,有效避免玻璃基板因冲击力不均而破裂,相较于气缸,电动缸具备压力可控、无“软着陆”冲击的优点;相较于液压缸,则拥有无漏油、低噪音、维护简便的显著优势。
仿真与测试:真实还原动态力学场景
在航天器振动台、车辆道路模拟机、地震模拟平台等大型测试装备中,伺服电动缸与伺服电机的组合是实现高动态、大推力波形输出的核心执行机构,一个典型的六自由度运动平台,通常由六台配备大导程滚珠丝杠的高功率伺服电动缸共同驱动,伺服电机需在极短时间(如20毫秒内)完成正反转加速,并同步输出高达数百千牛的峰值推力,这对电机的速度响应能力、丝杠的抗冲击承载能力以及整体系统的结构刚度提出了极为严苛的要求。
医疗与康复:有温度的精准运动控制
在手术机器人及康复外骨骼领域,伺服电动缸正逐步替代液压、气压等传统方案,以助行外骨骼的关节驱动为例,小型扁平式伺服电机与紧凑型滚柱丝杠电动缸高度集成,不仅能够精确控制关节角度(误差<0.1°),还能利用恒力输出模式实现“柔顺性”控制,在接触人体时,系统能实时调节输出力,避免对软组织造成二次损伤,此类场景要求电机具备低转速、高扭矩的特性,并且电动缸的背隙必须极小,以保证反向驱动时的平滑与自然触感。
未来趋势:智能化、集成化与人机共融
随着芯片算力的提升、控制算法的优化以及新型材料的应用,伺服电动缸与伺服电机正经历着三大明显的发展演变:
- 高度集成化:将伺服驱动器、编码器、甚至运动控制算法集成到电机后盖内部,形成“智能伺服电动缸”,大幅减少外部接线与潜在故障点,提升系统可靠性与装调效率。
- 总线化与互联互通:通过EtherCAT、PROFINET等实时工业以太网协议实现多轴同步控制,并支持远程状态监测、数据追溯及预测性维护,赋能设备全生命周期管理。
- 本体感知与自决策能力:通过在电动缸内部集成力传感器、温度传感器及微处理器,使执行器自身具备过载预警、位置偏差自适应补偿、磨损趋势诊断等功能,真正进化为具有“智慧”的智能节点。
伺服电动缸与伺服电机的完美结合,绝非简单的“电机+丝杠”机械堆砌,而是电气、机械、控制三位一体系统工程的结晶,它使直线运动从“能完成”的粗放阶段,迈入了“精准、高速、柔性与智能兼得”的精益时代,在自动化技术深耕各行各业的过程中,深刻理解这对“黄金搭档”的协同与匹配原理,正是工程师设计高性能、高可靠性运动控制系统的必由之路,展望未来,随着AI辅助参数自整定及无传感器控制技术的持续突破,这对黄金搭档必将进一步释放潜能,为智能制造迈向新的精度与效率高峰,注入源源不断的核心动力。
咨询与购买伺服电动缸,请联系:
孙辉 17512080936