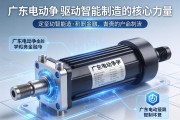

伺服电动缸内部结构,精密驱动与智能控制的完美结合
伺服电动缸的内部结构实现了精密驱动与智能控制的深度融合,其核心由高精度滚珠丝杠、伺服电机及集成编码器组成,通过将电机的旋转运动高效转化为直线运动,保证了极高的定位精度与重复性,缸体内部嵌入力传感器与温度监控模块,实时反馈运行状态,智能控制系统则基于闭环算法,动态调节速度、位置与推力,以应对复杂工况,这一结构设计不仅消除了液压系统的泄漏隐患,更通过数字化接口实现远程诊断与自适应调节,使电动缸在工业自动化、机器人等领域展现出卓越的动态响应与长期可靠性。
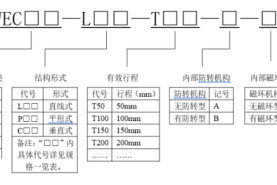
伺服电动缸作为一种将伺服电机与丝杠、缸体等机械部件高度集成的直线驱动单元,在现代工业自动化、机器人、航空航天及医疗设备等领域扮演着关键角色,其核心优势在于能够实现高精度、高速度、高可靠性的直线运动控制,并可通过数字通讯协议与上位控制系统实现无缝对接,要深入理解伺服电动缸的性能边界与选型逻辑,剖析其内部结构是必不可少的一步,以下将从动力源、传动机构、执行组件、传感反馈及支撑密封系统五个维度,解析其精密构造。
伺服电动缸的驱动核心是交流伺服电机,通常采用永磁同步电机(PMSM)或直流无刷电机(BLDC),其绕组采用高性能铜线,转子则由高磁能积的钕铁硼永磁体构成,确保在高负载工况下仍能保持高效率与低发热,电机尾部通常集成有编码器或旋转变压器,用于实时监测转子位置与转速,电机的散热设计(如自然冷却、强制风冷或水冷)直接决定了电动缸在连续工作制下的热稳定性与使用寿命。

传动机构:丝杠与螺母
传动机构是实现旋转运动向直线运动转化的关键部件,根据精度与负载需求,主要分为以下三类:
- 滚珠丝杠副:通过循环滚珠在丝杠与螺母之间的滚动摩擦替代滑动摩擦,传动效率高达90%以上,适用于高精度(C3至C5级)、高速度(线速度可达1m/s以上)及中等负载场景,其内部设有回流装置(如端盖式或循环管式),确保滚珠在封闭轨道内持续循环。
- 行星滚柱丝杠副:适用于负载极大(如重型压力机、风力发电变桨系统)或对寿命与刚性有极致要求的场合,该结构由螺母与丝杠之间啮合多个滚柱,形成线接触,承载能力是同等尺寸滚珠丝杠的3至5倍,并能承受高频冲击与振动。
- 滑动丝杠副(梯形丝杠):成本低,具备自锁功能,但摩擦大、效率低(30%-50%),适用于低速、低负载或对精度要求不高的场景,如简单搬运或定位操作。
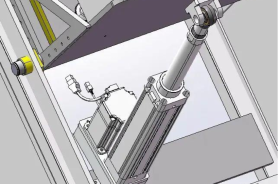
执行组件:缸筒、活塞与推杆
- 缸筒:通常采用高强度铝合金或无缝钢管制造,内壁经精密珩磨处理,表面粗糙度可达Ra0.4μm以下,以降低摩擦并提供良好导向精度,缸筒内部一侧加工有通孔或开槽,用于安装限位开关、磁簧开关等位置检测元件。
- 活塞:与推杆一体式连接(或通过螺纹/卡键分体连接),其外径与缸筒内壁形成精密配合,活塞上装配有Y型密封圈、防尘圈与导向环(如PTFE复合材料或青铜),在低速、高频或高压工况下为密封与导向提供可靠保障。
- 推杆:采用高强度合金钢,表面经镀铬或渗碳处理,硬度可达HRC58-62,兼具耐磨性与抗弯刚度,推杆前端通常加工有安装螺纹孔或法兰,用于连接外部负载。
传感与反馈系统
伺服电动缸的闭环控制精度依赖于其内部的传感网络:
- 位置反馈:除电机编码器外,高端电动缸会在推杆末端集成直线编码器(如磁栅或光栅),分辨率可达纳米级,直接测量位移而非间接推算,从而消除丝杠反向间隙与弹性变形误差。
- 力反馈:部分压力控制型电动缸内置力传感器(如应变片式或压电式),将缸体内部的压缩力或拉力信号转换为电信号,配合伺服驱动器实现力闭环控制(如压装、焊接工艺中的力位复合控制)。
- 温度与限位检测:热敏电阻(PTC/NTC)嵌入电机绕组或丝杠螺母附近,用于过温保护;接近开关或霍尔传感器安装在缸筒行程两端,提供硬件限位信号,避免机械碰撞。
支撑与密封系统
- 轴承支撑:丝杠两端通常由角接触球轴承或圆锥滚子轴承支承,承受轴向与径向复合载荷,螺母一端采用浮动轴承设计(如深沟球轴承),允许微量的角度偏转,以补偿装配误差。
- 密封结构:为防止粉尘、切削液等污染物侵入,电动缸推杆出口处配置多层密封组件:最外层为刮刷环(金属骨架或聚氨酯材质),中间层为骨架油封,内层为O型圈密封,缸筒两端设有注油嘴(或预注润滑脂)的油路,确保丝杠副长期稳定运行。
总结与选型建议
伺服电动缸的内部结构是精密机械设计与智能控制技术的结晶,从永磁电机的定子磁路设计,到滚柱丝杠的微观接触力学,再到编码器信号的实时解算,每一个细节都服务于最终的性能指标:重复定位精度可达±0.01mm,最大推力可达100吨级,最高速度可达3m/s以上,在选型时,应从负载类型(推力/拉力)、运动曲线(速度/加速度)、环境条件(洁净度/温度)及控制要求(位置/力/速度模式)出发,动态权衡丝杠类型、轴承配置及密封等级,方可充分发挥伺服电动缸在自动化系统中的最大效能。
咨询和购买伺服电动缸请联系:孙辉 17512080936
精密驱动,智造未来,上海伺服电动缸产业的崛起与创新
« 上一篇
2026-05-15
伺服电动缸,工业自动化精准驱动的核心引擎
下一篇 »
2026-05-15