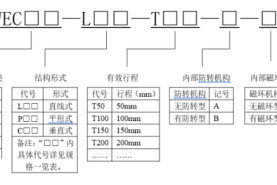

伺服电动缸结构,精密传动与控制的核心拆解
根据所提供的伺服电动缸结构内容,其核心在于将伺服电机、精密滚珠丝杠与闭环控制系统深度融合,实现高精度直线运动,拆解来看,**电机直连或通过同步带驱动丝杠旋转,丝杠螺母将旋转运动转化为推杆的直线运动**,关键部件包括高刚性丝杠消除背隙、高承载轴承支撑轴向力,以及集成于电机尾端的**编码器或光栅尺实时反馈位置信号**,控制端通过驱动器调节电流与转速,形成全闭环调节,从而**精确控制推力、速度与位置**,缸体内部结构如防转导向键和润滑密封系统,进一步保障了传动的平稳性与使用寿命,使其成为工业自动化中精密传动与控制的核心执行单元。
在工业自动化与智能装备领域,伺服电动缸正逐步取代传统液压与气动系统,成为实现精准直线运动的核心执行元件,它通过将伺服电机与丝杠传动机构高度集成,实现了对位置、速度与力矩的闭环控制,一套完整的伺服电动缸,其内部结构究竟包含哪些关键部件?这些组件又是如何协同完成精密动作的?本文将为您逐一拆解剖析。
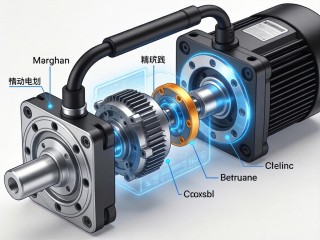
动力源:伺服电机
伺服电动缸的“心脏”是伺服电机,与普通电机不同,伺服电机内置编码器(如旋转变压器或光电编码器),能够实时反馈转子位置与转速信息,其定子绕组多采用高性能钕铁硼永磁材料,配合矢量控制算法,即使在低速大扭矩工况下,也能保持极高的响应速度与运行平稳性,伺服电机的输出轴直接或通过联轴器与丝杠相连,是整个系统的动力源泉。
传动核心:滚珠丝杠与行星滚柱丝杠
传动机构是实现直线运动的关键环节,主流方案为滚珠丝杠副,由丝杠轴、螺母与滚珠组成,滚珠在丝杠轴的滚道与螺母之间循环滚动,将旋转运动高效转化为螺母的直线运动,其特点包括摩擦小、传动效率高(可达90%以上)、定位精度高,针对重载或高刚度需求场景,则采用行星滚柱丝杠——以滚柱替代滚珠,线接触结构使承载能力提升数倍,寿命更长,广泛应用于注塑机、锻压设备等领域。

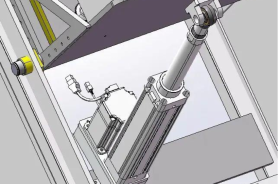
支撑与导向:高刚性壳体与直线导轨
电动缸的壳体通常采用高强度铝合金或钢材,经过精密加工,确保内部同轴度与整体刚度,壳体内部设有轴承座,用于支撑丝杠两端(多采用角接触球轴承以承受轴向力),对于输出端需承受侧向力矩(如推动重物时产生偏载)的工况,壳体会集成直线导轨或导向套,防止活塞杆(即螺母驱动端)旋转并承受侧向力,从而保证运动的直线度与稳定性。
位置反馈:编码器与外部传感器
闭环控制的前提是精确的位置反馈,伺服电机后端的编码器提供电机轴向的旋转角度信号;对于对绝对位置要求较高的系统,还会在电动缸壳体侧端增设外部线性编码器(如磁栅尺或光栅尺),直接测量活塞杆的绝对位移,补偿丝杠反向间隙与热胀误差,使重复定位精度达到微米级。
保护与密封:防尘伸缩罩与密封圈
工业现场常伴随粉尘、冷却液或切屑等污染物,电动缸的前盖处安装有防尘密封圈(如唇形密封或迷宫密封),并加装折叠式防尘伸缩罩(通常为橡胶或PVC材质),覆盖裸露的活塞杆,对于重污染环境,还可选用全封闭不锈钢外壳,并充入惰性气体,防止内部丝杠与轴承受到污染和腐蚀。
制动单元:电磁刹车
当电动缸垂直安装或需要断电自锁时(如Z轴升降机构),其末端会配备电磁失电制动器,断电瞬间,弹簧加压摩擦片迅速锁死电机转轴,防止负载坠落,制动响应时间通常在50毫秒以内,并与伺服驱动器的安全逻辑实现联动控制。
辅助结构:润滑与冷却系统
丝杠与轴承需要长期润滑维护,常见方式为预注油脂(润滑脂)或通过壳体外接油嘴定时加注,在高速、高频应用中,还需设计循环冷却系统:在电机法兰或壳体外壁布置冷却液流道,通过外部冷却设备带走热量,防止温升导致丝杠热伸长而引发定位失控。
结构协同流程简析
当上位机发出位置指令后,伺服驱动器根据指令与编码器反馈,控制电机定子磁场矢量,驱动转子精确旋转至指定角度,电机扭矩通过联轴器传递给丝杠,滚珠在丝杠与螺母之间滚动并产生推力,推动螺母沿轴向移动,从而带动活塞杆(即执行端)伸出或缩回,整个过程中,编码器与外部传感器以毫秒级频率采样位置信号并回传驱动器,形成闭合控制回路,实时修正与目标位置之间的偏差。
伺服电动缸的结构远非“电机加丝杆”如此简单,从精密滚珠/滚柱丝杠副,到高刚性壳体、导向导轨、反馈传感器,再到密封制动与热管理系统,每一环节都是机械、电气与控制深度融合的成果,正是这种精巧的结构组合,使伺服电动缸能够在半导体、医疗器械、汽车制造、军工等领域,以极高可靠性实现纳米级的运动控制,深入理解其结构,是做好运维选型、故障诊断乃至创新优化的重要基础。
咨询与购买伺服电动缸,请联系:孙辉 17512080936