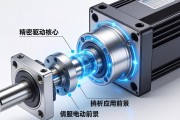

精密驱动核心,伺服电动缸结构解析与应用
精密驱动核心——伺服电动缸,是将伺服电机与丝杠、缸体等机械部件高度集成的直线传动单元,其核心结构由伺服电机、高精度滚珠/行星滚柱丝杠、缸筒、导向装置及编码器等组成,工作时,伺服电机将旋转运动通过丝杠螺母副转化为精确的直线运动,配合编码器与伺服驱动器的闭环控制,实现高精度、高响应速度及高刚性的位置、速度与力控,广泛应用于自动化产线、六自由度平台、医疗器械及工业机器人等高端装备领域,替代传统液压与气动,成为现代精密驱动与智能制造中的关键执行元件。

在现代工业自动化的浪潮中,伺服电动缸凭借其高精度、高效率和清洁环保的特性,正逐步取代传统的液压缸和气动缸,成为智能制造装备中不可或缺的核心执行元件,伺服电动缸究竟由哪些关键结构组成?这些精密的部件又如何无缝协同,最终实现令人惊叹的精准直线运动控制?本文将为您层层拆解,深入浅出地解析这一精密驱动核心。
伺服电动缸的基本构成
伺服电动缸是一种将伺服电机的旋转运动,通过机械传动机构高效转化为直线运动的模块化精密执行单元,其核心结构通常包含以下几个部分:
伺服电机——动力源泉
伺服电机是电动缸的动力心脏,负责输出精确可控的旋转扭矩与转速,现代伺服电机以其高动态响应、高定位精度和宽调速范围著称,其内部集成了高分辨率编码器,能够实时向伺服驱动器反馈转子的位置、速度和加速度信息,为全闭环控制系统奠定了基础。
- 技术点补充:常见的伺服电机有同步交流伺服电机和直流无刷伺服电机等,其内置的编码器类型(如增量式、绝对值式)直接影响了系统的定位精度与控制方式。
传动机构——运动转换的核心
传动机构是伺服电动缸将旋转运动转换为直线运动的关键,其性能直接决定了电动缸的精度、速度和承载能力,主要类型包括:
-
滚珠丝杠副:作为当前最主流的选择,它通过丝杠与螺母之间的滚珠实现滚动摩擦,具有传动效率高(可达90%以上)、摩擦力低、磨损小、寿命长等优点,并能实现微米级或更高的定位精度,适用于大多数精密定位和中等负载场合。
-
行星滚柱丝杠:针对重载、高速、高刚性和极端工况而生,其核心是多个小直径滚柱围绕丝杠作行星运动,与丝杠和螺母的接触面积远超滚珠,因此承载能力和刚性极强,抗冲击性能卓越,常见于伺服压机、冲压设备、重型举升等场景。
-
同步带传动:结构相对简单,成本较低,且能实现高速长行程运动,但其传动精度和承载能力相比丝杠副较弱,且存在皮带张紧和寿命问题,因此主要应用于对精度要求不高、但需要快速移动或低成本的场景。
导向机构——精准定向的保障
导向机构用于约束推杆的直线运动方向,并承受径向负载和侧向力矩,防止推杆旋转或偏摆,常见形式包括:
- 内置直线导轨或线性滑块:集成度高,能够承受较大的侧向力,提供高刚性和高精度的导向,适用于复杂受力工况。
- 导向套/导向轴承:结构紧凑,成本较低,适用于空间有限、侧向力不大的场合。
- 双轴导向:采用两根平行导杆,具有极高的抗扭转刚性,适合需要强力抵抗旋转力矩的应用。
推杆与缸体——坚固的执行与防护
- 推杆:作为直接执行外部直线运动的部件,通常选用高强度合金钢或不锈钢材质,其表面经过精细的镀铬、镀镍或硬质阳极氧化处理,不仅提升了耐磨性,更增强了防腐防锈能力,以适应各类严苛环境。
- 缸体:作为外壳结构,缸体不仅保护内部精密的光学编码器、丝杠、轴承等组件免受污染,还提供了标准的法兰、耳轴、脚座等安装接口,方便用户集成。
密封与润滑系统——长效运行的守护者
- 密封系统:包含防尘圈、唇形密封圈等,能有效阻挡外界的粉尘、水滴、切削液等污染物进入缸体内部,同时防止内部润滑油脂泄漏,是保证电动缸在恶劣环境下长期可靠运行的生命线。
- 润滑系统:通过预加润滑脂或设计油嘴进行定期注油,确保丝杠、螺母、导轨和轴承等运动副始终处于良好润滑状态,显著降低磨损,延长使用寿命。
位置反馈与限位装置——精准安全的双重保险
-
内置或外置编码器/光栅尺:在推杆或丝杠端部集成额外的线性编码器(如磁珊或光栅尺),可以构成“全闭环”控制系统,直接测量推杆的实际直线位移,消除传动背隙和丝杠热膨胀等误差,实现最高等级的定位精度。
-
磁性开关、接近开关或光电传感器:安装于缸体特定位置,用于检测推杆的极限位置(最大、最小行程)或任意设定的中间位置,提供冗余保护信号。
-
机械限位(防撞块):作为最终的安全屏障,安装在推杆或缸体的末端,当电气检测失效且驱动器失控时,通过物理接触强制停止推杆运动,防止机械碰撞损坏。
各部分协同工作原理:从指令到运动的闭环之旅
伺服电动缸的整个工作过程,是一个精密而快速的连续闭环控制循环:
- 指令发出:上位控制器(如PLC、运动控制卡)下达目标位置指令(推杆前进100mm,速度50mm/s”)。
- 驱动器解析与驱动:伺服驱动器接收指令,将其换算为电机的目标转速和角度,并驱动伺服电机以相应的扭矩和速度开始旋转。
- 运动转化:电机通过联轴器或同步轮带动丝杠旋转,丝杠的旋转运动驱动螺母沿丝杠轴向直线移动,从而推动与螺母连接的推杆前进或后退。
- 实时反馈:电机内置编码器(或外部位移传感器)毫秒级地检测电机的实际旋转角度(或推杆实际位移),并将该位置/速度信号反馈给伺服驱动器。
- 误差修正:伺服驱动器将实际位置与目标位置的差值进行比较,根据PID控制算法或更先进的控制策略,瞬时调整电机的输出(扭矩、转速或相位),实现精确的位置、速度和力控制。
在这一精密的闭环中,传动机构的刚度与间隙、导向机构的刚性、伺服电机的响应带宽与控制器的算法,共同决定了最终的动态响应速度、稳态精度和重复定位精度。
结构设计的关键考量
在进行伺服电动缸的选型或设计时,以下结构因素必须综合权衡:
- 精度等级:由丝杠导程的模数、预紧方式(如双螺母预紧)、编码器分辨率与控制系统共同决定,标准产品重复定位精度通常可达±0.01mm,通过全闭环系统可轻松达到±0.005mm或更高。
- 负载能力:轴向负载能力主要取决于丝杠的直径、螺纹升角和螺纹牙底半径;径向与侧向负载能力则依赖于导向机构(滑块、导轨)的型号和布局。
- 速度与行程:最大线速度由丝杠导程(螺旋线间距)与电机最高转速的乘积决定;有效行程受缸体长度和丝杠加工长度的限制。
- 环境适应性:防护等级(IP54/IP65/IP67)、工作温度范围、耐腐蚀性(需指定镀层或材质)、是否需要防爆认证等,必须匹配具体的工业或特种环境。
- 安装形式:前法兰(轴向力)、后耳环(可适应微小角度偏转)、脚座(固定式)、铰轴式等不同安装方式直接影响受力点的位置和系统的惯性矩。
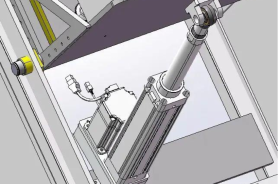
典型应用场景
凭借其精确可控、易于与PLC/PC集成、免维护(无油液泄漏)及节能环保等显著优势,伺服电动缸已广泛渗透至各行各业:
- 工业机器人:如协作机器人关节运动、转移平台升降、焊接变位机。
- 自动化装配与测试线:用于精密定位抓取、伺服压装(力位控制)、铆接、点胶、拧紧及各种功能测试。
- 高端医疗设备:如手术床或扫描床的静音高精度升降与进给系统、康复机器人关节、实验室移液工作站。
- 航空航天:飞行模拟器的动作模拟平台、风洞实验中的模型姿态调整。
- 新能源汽车与电池制造:电池模组堆叠、极片压平、电池包的生产与压装。
深入理解伺服电动缸的结构组成及其协同工作原理,是进行科学选型、高效调试与维护保养的基石,随着伺服驱动技术、精密丝杠加工工艺、新材料和先进控制算法的不断突破,电动缸正朝着更高速度(>5m/s)、更高精度(亚微米级)、更高功率密度(更小体积更强出力)以及更强智能化(集成力传感器、自诊断、IO-Link通信)的方向演进,对于投身智能制造的工程师而言,扎实掌握这一核心执行部件的技术细节,无疑是在自动化技术与工业4.0浪潮中保持竞争力的重要资产。
咨询和购买伺服电动缸请联系:孙辉 17512080936